I’m a Research Manager at Insta360, interested in multimodal panoramic perception and embodied intelligence.
Previously, I earned my Ph.D. from Sun Yat-sen University, under the supervision of Prof. Hui Cheng and Prof. Xu Yang. I also spent one and a half years at Tencent Robotics X, working on dexterous manipulation.
Join us:
Our team is expanding! We are hiring at all levels (leads, full-time, interns) to push the boundaries of VLM and embodied agents.
Updates
- Jun 2026 One paper accepted to ECCV 2026.
- May 2026 One paper accepted to ICML 2026.
- Feb 2026 Two papers accepted to CVPR 2026.
- Sep 2025 One paper accepted to NeurIPS 2025.
- July 2025 I finished my PhD at SYSU.
- Jun 2025 One paper accepted to IROS 2025.
- Feb 2025 One paper accepted to CVPR 2025.
- Jun 2024 One paper accepted to IROS 2024.
- May 2024 One paper accepted to ICML 2024.
Research
 STRNet: Visual Navigation with Spatio-Temporal Representation through Dynamic Graph Aggregation
STRNet: Visual Navigation with Spatio-Temporal Representation through Dynamic Graph Aggregation
Hao Ren, Zetong Bi, Yiming Zeng, Zhaoliang Wan, Lu Qi, Hui Cheng
The IEEE / CVF Computer Vision and Pattern Recognition Conference (CVPR), Feb 2026
Paper Project
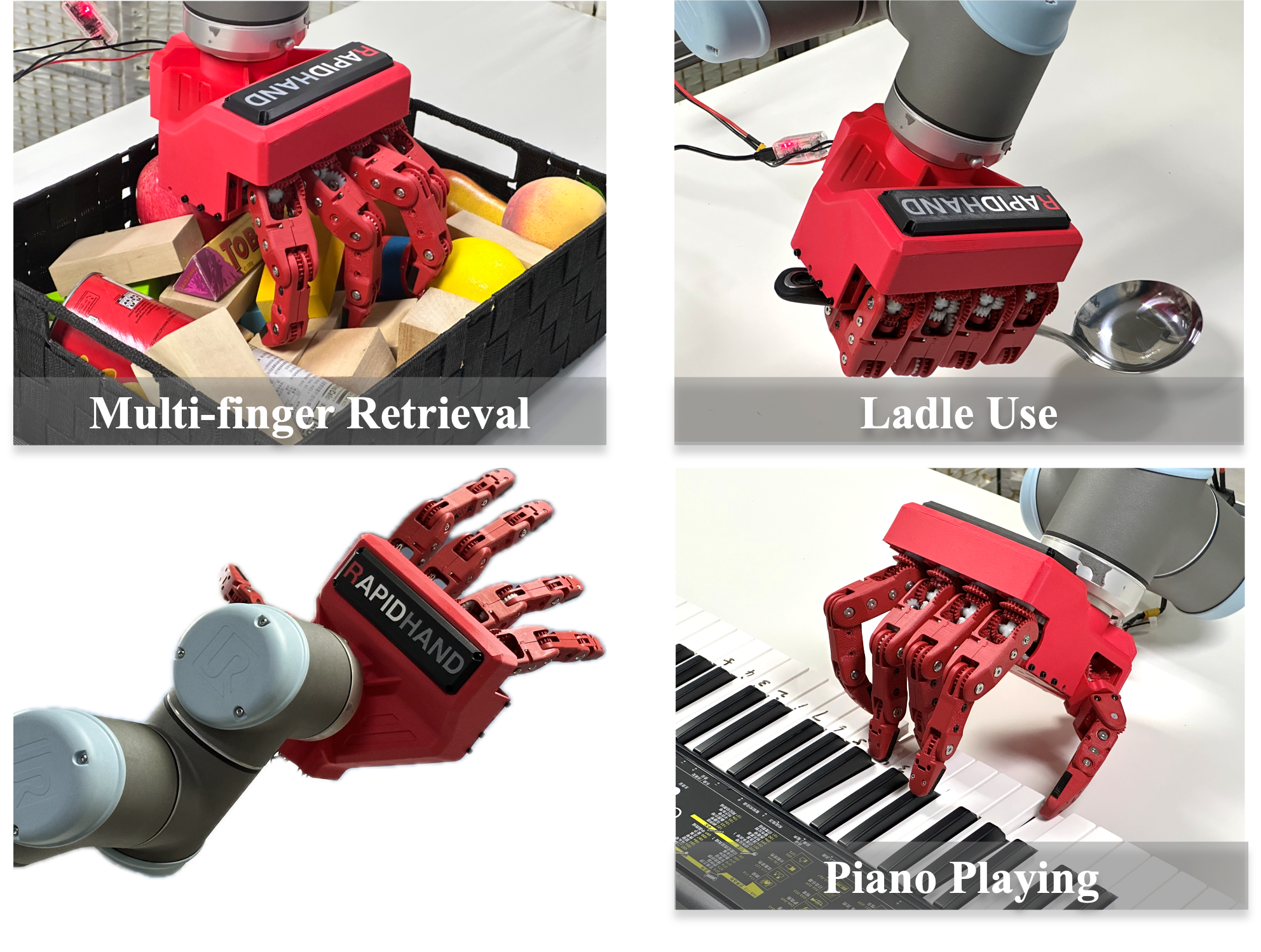
 RAPID Hand: A Robust, Affordable, Perception-Integrated, Dexterous Platform for Generalist Robot Autonomy
RAPID Hand: A Robust, Affordable, Perception-Integrated, Dexterous Platform for Generalist Robot Autonomy
Zhaoliang Wan, Zetong Bi, Zida Zhou, Hao Ren, Yiming Zeng, Li Yihan, Lu Qi, Xu Yang, Ming-Hsuan Yang, Hui Cheng
Conference on Neural Information Processing Systems (NeurIPS), Dec 2025
Paper Project
 RAPID Hand Prototype: Design of an Affordable, Fully-Actuated Biomimetic Hand for Dexterous Teleoperation
RAPID Hand Prototype: Design of an Affordable, Fully-Actuated Biomimetic Hand for Dexterous Teleoperation
Zhaoliang Wan, Zida Zhou, Zetong Bi, Zehui Yang, Hao Ding, Hui Cheng
IEEE International Conference on Intelligent Robots and Systems (IROS), Oct 2025
Paper Video
 Prior Does Matter: Visual Navigation via Denoising Diffusion Bridge Models
Prior Does Matter: Visual Navigation via Denoising Diffusion Bridge Models
Hao Ren, Yiming Zeng, Zetong Bi, Zhaoliang Wan, Junlong Huang, Hui Cheng
The IEEE / CVF Computer Vision and Pattern Recognition Conference (CVPR), Feb 2025
Paper Project
 OPG-Policy: Occluded Push-Grasp Policy Learning with Amodal Segmentation
OPG-Policy: Occluded Push-Grasp Policy Learning with Amodal Segmentation
Hao Ding, Yiming Zeng, Zhaoliang Wan, Hui Cheng
IEEE International Conference on Intelligent Robots and Systems (IROS), Oct 2024
Paper Video
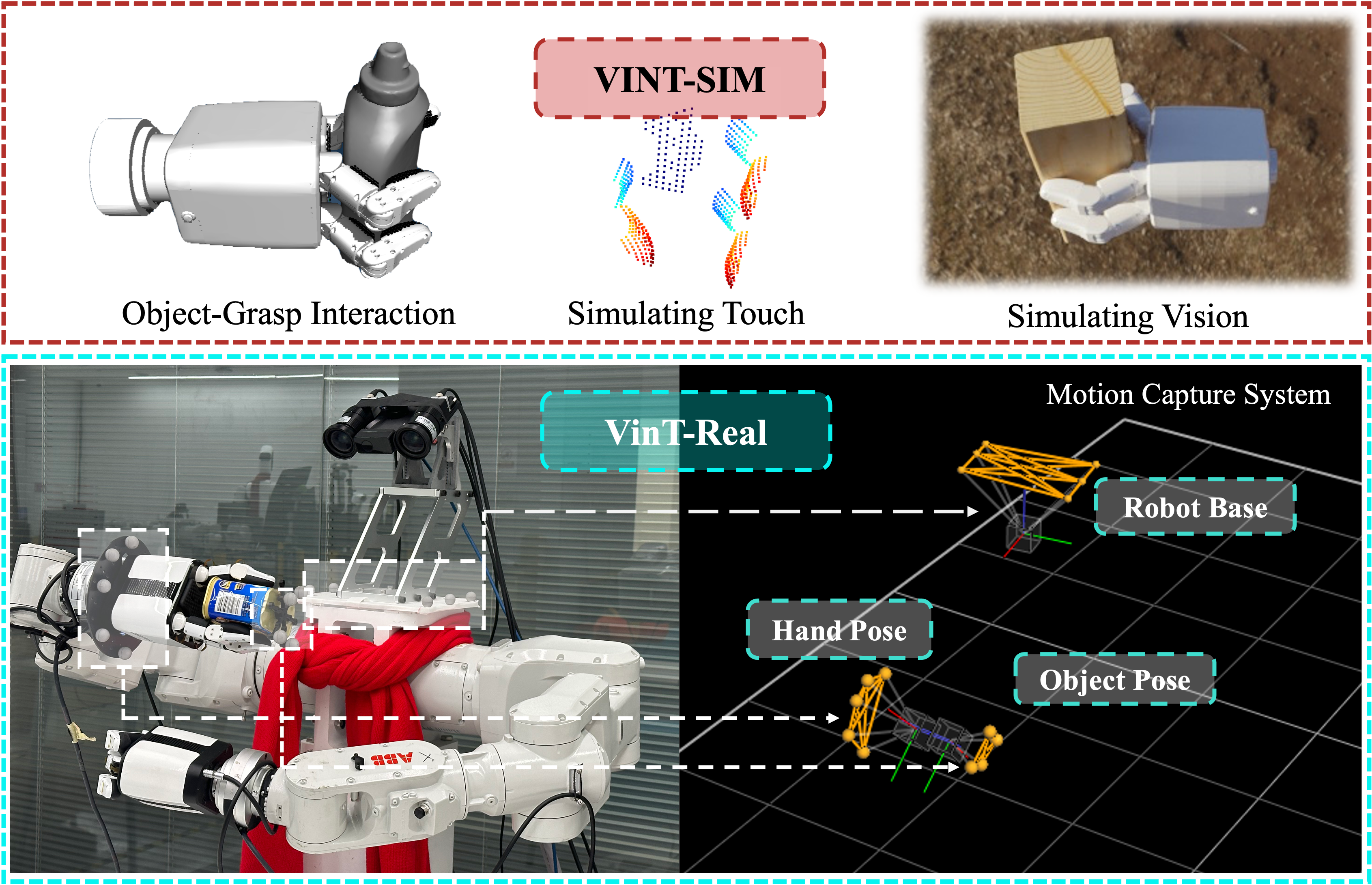 VinT-6D: A Large-Scale Object-in-hand Dataset from Vision, Touch, and Proprioception
VinT-6D: A Large-Scale Object-in-hand Dataset from Vision, Touch, and Proprioception
Zhaoliang Wan, Yonggen Ling, Senlin Yi, Lu Qi, Wangwei Lee, Minglei Lu, Sicheng Yang, Peng Lu, Xu Yang, Ming-Hsuan Yang, Hui Cheng
International Conference on Machine Learning (ICML), July 2024
Paper
 Uncertainty-based Exploring Strategy in Densely Cluttered Scenes for Vacuum Cup Grasping
Uncertainty-based Exploring Strategy in Densely Cluttered Scenes for Vacuum Cup Grasping
Kimwa Tung, Jingcheng Su, Junhao Cai, Zhaoliang Wan, Hui Cheng
IEEE International Conference on Robotics and Automation (ICRA), May 2022
Paper